

Istnieje wiele sposobów sterowania serwonapędami ASDA przy wykorzystaniu sterownika PLC z serii AS300:
- impulsowo (sygnały dir/step) PT
- PR mode (wykonywanie ścieżek zapisanych w serwonapędzie)
- zapisując ścieżki w serwonapędzie i wywołując je komendami poprzez protokół CANopen
- Za pomocą komend wysyłanych do serwonapędu w trybie CANopen Mode
- dedykowanymi instrukcjami “Delta CANopen Communication Instructions” dostępnymi w serii sterowników AS300
W poprzednich częściach artykułu zajmowaliśmy się sterowaniem impulsowym. W tej części artykułu będziemy korzystać z ścieżek PR, funkcjonalności wbudowanej w serwonapęd ASDA-A2.
Wszystkie poniższe przykłady były przetestowane na sterowniku AS332P-A oraz serwonapędach serii ASDA-A2.
Sposób 2. Wykonywanie zapisanych ruchów.
1. Zaczynamy zabawę, czyli konfiguracja serwonapędu
W przeciwieństwie do sterowania impulsowego nie mamy tutaj ograniczenia na ilość serwonapędów (chyba że zabraknie nam wyjść cyfrowych w sterowniku). W praktyce ten sposób nie jest zbyt często wykorzystywany ponieważ nie ma możliwości zmiany parametrów ruchu na inne niż zapisane wcześniej w serwonapędzie. Instrukcje przedstawione w tym artykule pozwolą nam jednak na zapoznanie się z metodologią zapisywania ścieżek do serwonapędu oraz wywoływaniem ich, co przyda nam się w następnej części cyklu artykułów o AS300.
Na początku pracy najlepiej jest przywrócić ustawienia fabryczne sterownika ponieważ nie wiadomo jaka jest obecna konfiguracja, możemy tego dokonać zapisując w serwonapędzie parametr P2-08 = 10. Po tej operacji wymagany jest restart zasilania logiki serwonapędu.
Po przywróceniu ustawień fabrycznych, parametr P1-01 powinien mieć wartość 0, zmieniamy wartość na 1 i ponownie restartujemy zasilanie. W tej chwili parametrem P1-01 zmieniliśmy tryb pracy na PR mode, włączyliśmy tym samym możliwość uruchamiania ścieżek poprzez złącze CN1 serwonapędu.
Obecnie na serwonapędzie pojawią się błędy od wyłączników krańcowych i wyłącznika bezpieczeństwa, dla testów można wyłączyć te funkcje, ale w rzeczywistym układzie, ze względów bezpieczeństwa, dobrze jest je zastosować (przynajmniej wyłącznik bezpieczeństwa). Wyłączamy te funkcje zmieniając wartości parametrów:
P2-15=0 (ustawianie funkcji wejścia DI6),
P2-16=0 (ustawianie funkcji wejścia DI7),
P2-17=0 (ustawianie funkcji wejścia DI8).
Do konfiguracji napędu potrzebne nam będzie oprogramowanie ASDA-Soft.
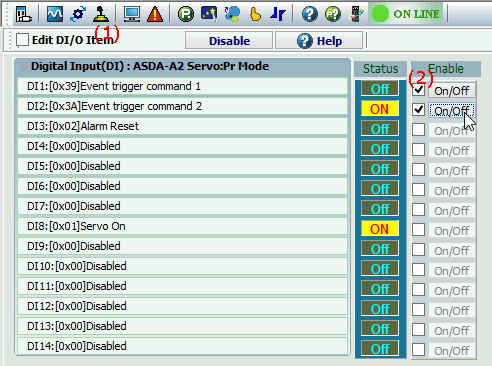
Po połączeniu z serwonapędem wybieramy Digital IO/Jog Control(1), zaznaczamy Edit DI/O Item(2), zmieniamy typ wejścia lub wyjścia(3) i dla każdej zmiany zatwierdzamy OK(4)
Gdy już wszystkie wejścia i wyjścia będą skonfigurowane jak na poniższym rysunku, możemy przejść do konfiguracji ścieżek.

Następnie wybieramy PR Mode Setup(1), Event ON/OFF Setting(2), oraz przypisujemy do eventów ścieżki PR#51 oraz PR#52(3). Następnie klikamy Download(4) aby zapisać nasze ustawienia do napędu.

Ścieżki są już przypisane, lecz jeszcze nie są skonfigurowane.
Do wyboru mamy kilka różnych typów ścieżek:
[1] = constant speed control, tryb prędkościowy, powoduje utrzymywanie zadanej prędkości obrotowej serwonapedu
[2] = Single Positioning control, tryb zadawania pozycji
[3] = Auto positioning control, tryb zadawania pozycji, po wykonaniu ruchu serwonapęd przechodzi do wykonywania kolejnej scieżki.
[7] = przejście do zadanej ścieżki
[8] = zapisanie wartości do rejestru.
W celu skonfigurowania ścieżki do wykonywania ruchu na pozycję, przechodzimy do ustawień ścieżki (1). Należy ustawić kolejno:
- typ ścieżki(2) [2] ruch na pozycję,
- typ ruchu(3) absolutny, relatywny lub inkrementalny,
- czasy przyśpieszania i hamowania(4), wybieramy z listy
- prędkość ruchu(5) wybieramy z listy.
- pozycję końcową (6).
- Po ustawieniu wszystkich niezbędnych wartości, zapisujemy konfigurację ścieżki do serwonapędu(7).

W swoim przypadku ścieżkę PR#51 ustawiłem jako ruch absolutny na pozycję 0 (konfigurację widać na powyższym zdjęciu), a PR#52 jako ruch inkrementalny o 1000 impulsów.
Poprawność działania ścieżek możemy sprawdzić poprzez oprogramowanie ASDASoft, w tym celu przechodzimy na Digital IO/Jog Control(1) (ten sam na którym ustawialiśmy funkcje wejść) i zaznaczamy checkboxy(2) obok wejść DI1, DI2 oraz DI8, teraz możemy symulować sygnały wejściowe. Po kliknięciu na przycisk On/Off wymusimy informację o pojawieniu się sygnału na wybranym wejściu niezależnie od stanu fizycznego wejścia. Jeśli wszystko jest poprawnie ustawione, to po ustawieniu wejścia Servo on, w momencie zbocza narastającego na wejściu DI1 lub DI2, serwonapęd powinien wykonać zaprogramowane ruchy.
2. Jak nie zrobić zwarcia czyli połączenie sygnałów pomiędzy sterownikiem AS300 a serwonapędem
Aby wyzwolić zapisane ścieżki sygnałem zewnętrznym musimy podłączyć:
- AS300 Y0.0 – DI1 = Event trigger 1
- AS300 Y0.1 – DI2 = Event trigger 2
- AS300 Y0.16 – DI8 = Servo On
- AS300 X0.0 – DO1 = Servo ready
- AS300 X0.1 – DO2 = PR command completed
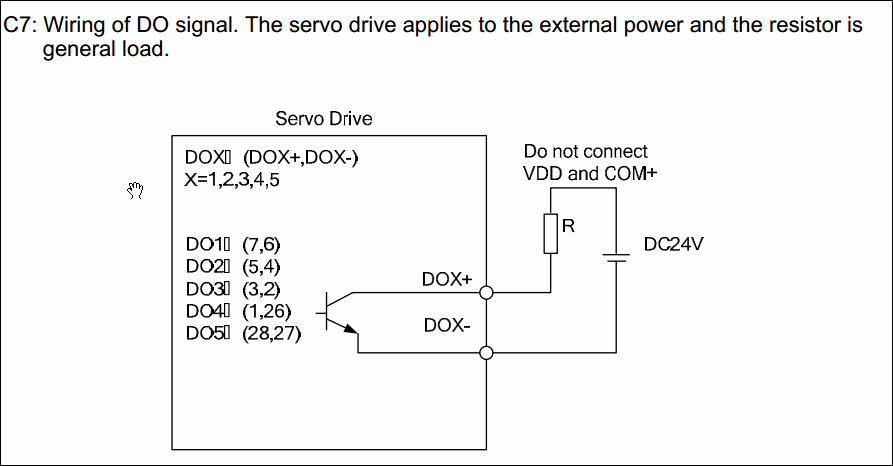
Poza sygnałami sterującymi, będziemy mieli podłączone 2 sygnały zwrotne: Serwo ready (oznacza gotowość serwonapędu do działania) oraz PR command completed (oznacza zakończenie wykonywania ścieżki). Poniżej schematy podłączeń wejść i wyjść serwonapędu ASDA-A2.

3. Jak to wprowadzić w ruch? czyli piszemy program.
Program na sterownik jest bardzo prosty więc poniżej zamieściłem cały kod.
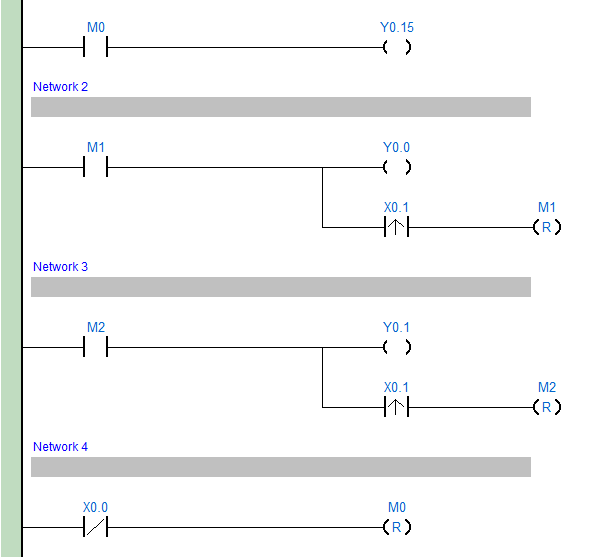
Załączenie M0 powoduje włączenie serwonapędu (Serwo On), M1 wywołanie ścieżki PR#51 ruch absolutny na pozycję 0, a włączenie M2 wywołanie ścieżki #52 czyli ruch inkrementalny o 1000 impulsów.
W ten sposób można łatwo wykonywać ruchy serwonapędem pod warunkiem, że nie potrzebujemy zmieniać parametrów ruchu. Za pomocą tego sposobu jest możliwość wywoływania tych ruchów za pomocą sterownika bez żadnego interfejsu komunikacyjnego i bez szybkich wyjść. W wyjątkowych sytuacjach jest także możliwość wywoływania tych ruchów bez zastosowania sterownika PLC np. poprzez standardowy przycisk fizyczny lub czujnik indukcyjny.
Do Pobrania:
PR MODE