Komunikacja CAN pomiędzy dwoma modułami DVPCOPM- konfiguracja połączenia
Sposób komunikacji sterowników PLC (na przykładzie SV) wyposażonych w moduły COPM z wykorzystaniem magistrali CAN.
1.Połączyć porty CAN modułów zgodnie z oznaczeniami na modułach (CAN+ do CAN+, SHLD do SHLD, CAN- do CAN-, GND do GND). Zaleca się zastosować połączenie poprzez kartę rozszerzeń (np. TAP-CN03).
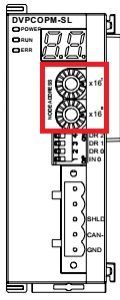
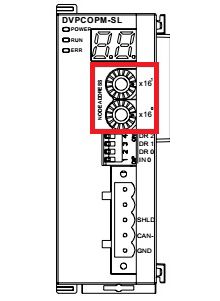
2.Ustawić na modułach wybrane adresy urządzeń w sieci CAN (każde urządzenie w sieci musi mieć inny adres). Górne pokrętło wprowadza adres z mnożnikiem 16, dolne-1, więc adres urządzenia to liczba na górnym pokrętle pomnożona przez 16 plus liczba na dolnym pokrętle. Dopuszczalny zakres adresów to 1-127 (zabronione: 0, 128).
W przykładzie użyto adresów 1 (dla sterownika MASTER) i 2 (dla sterownika SLAVE).
3. Podłączyć do sterownika kabel komunikacyjny (możliwości komunikacji: RS232, RS485, Ethernet).
W przykładzie użyto komunikacji RS232 poprzez konwerter USB-RS232.
4. Uruchomić program Delta CANOpen Builder. Przejść do Setup – Communication Settings i skonfigurować parametry połączenia RS232/RS485 w System Channel lub Ethernet w Ethernet Channel.
Dla połączenia z przykładu użyto parametrów: Interface- Via PLC Port, Address-1, Baud rate- 9600, Data bits- 7, Parity- Even, Stop Bits- 1, Mode- ASCII, czyli parametrów domyślnych.
5.Połączyć się fizycznie ze sterownikiem, który powinien pracować w trybie SLAVE i kliknąć przycisk Online (F10). W pojawiającym się oknie wybrać moduł COPM, który chcemy skonfigurować (gdy do sterownika podłączony jest jeden moduł, tylko on będzie widoczny) i zaakceptować wybór.
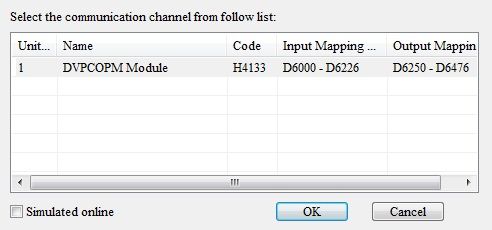
Rozpocznie się przeszukiwanie sieci.
6. Kliknąć prawym przyciskiem myszy na odnaleziony moduł i przejść do Properties. Tam w polu Work Mode wybrać Slave Mode.
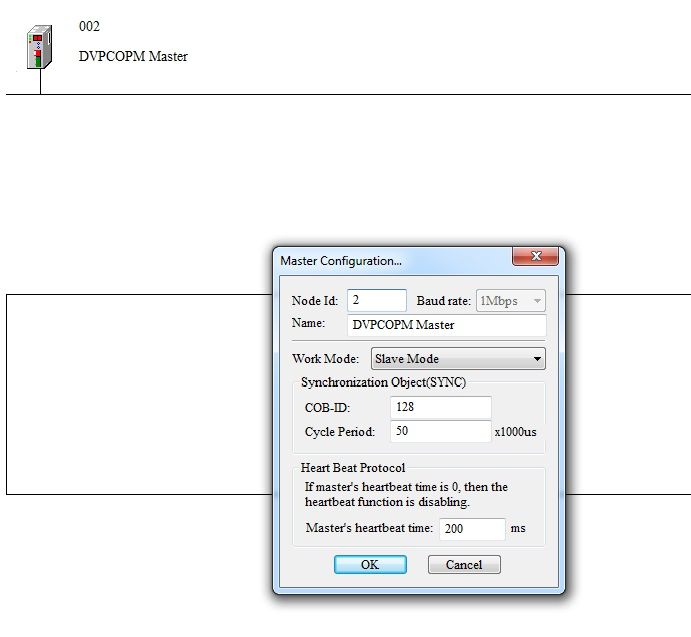
7. Wgrać ustawienia do modułu komunikacyjnego używając przycisku Download.
![]()
8. Połączyć się fizycznie ze sterownikiem MASTER i kliknąć przycisk Online (F10). W pojawiającym się oknie wybrać moduł COPM, który chcemy skonfigurować (gdy do sterownika podłączony jest jeden moduł, tylko on będzie widoczny) i zaakceptować wybór.
Dla przykładowego zagadnienia efektem tego działania było wyszukanie w sieci dwóch modułów- jednego w trybie MASTER, drugiego- SLAVE.

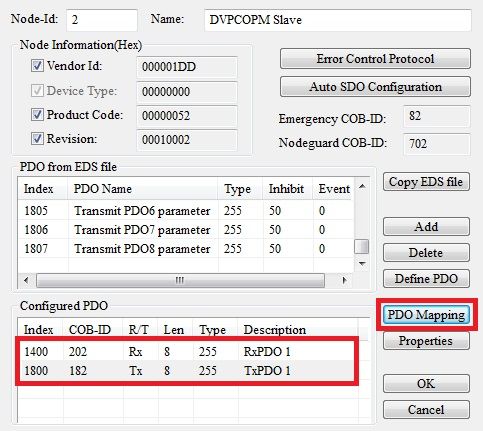
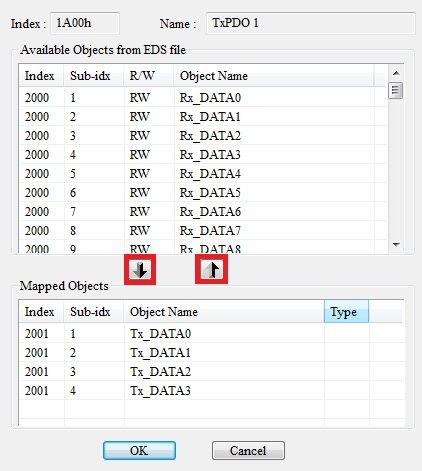
9. Przejść do ustawień urządzenia SLAVE poprzez jego dwukrotne kliknięcie. Wybierając odpowiednią pozycję na liście Configured PDO (Rx- dotyczącą odbierania, Tx- dotyczącą wysyłania) i klikając na PDO Mapping możemy przejść do konfiguracji wymienianych pomiędzy modułami komunikacyjnymi pakietów. Dla modułów COPM są to specjalne rejestry służące do komunikacji. Używając strzałki w górę i w dół możemy wybrać, które z nich zostaną powiązane z rejestrami sterownika. Domyślnie dla modułu COPM są to 4 pierwsze rejestry tranmisji (zawierające 8 bajtów danych, co jest limitem transmisji).
W przykładzie użyto domyślnych ustawień urządzenia SLAVE.
10. Dwukrotnie kliknąć na urządzenie MASTER celem przejścia do jego konfiguracji.
a) Z listy Avaliable Nodes wybrać urządzenie SLAVE i kliknąć strzałkę w prawo, by uaktywnić komunikację z danym urządzeniem.
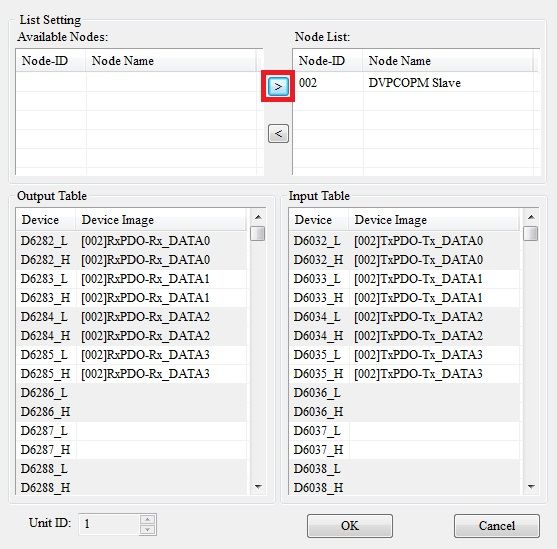
b) W polach Output Table oraz Input Table możemy sprawdzić jakie adresy sterowników PLC zostaną zmapowane poprzez moduły komunikacyjne. Dane zapisane na jednym sterowniku w adresach z listy Output Table dostępne będą w drugim sterowniku pod adresami z listy Input Table.
11. Po dokonaniu wszystkich zmian uaktualnić konfigurację sterowników klikając przycisk Download.
Komunikacja CAN pomiędzy dwoma modułami DVPCOPM- program sterownika
1.Połączyć się ze sterownikiem SLAVE. Uruchomić program ISPSoft i utworzyć nowy projekt zgodny z modelem sterownika. Utworzyć nowy program w projekcie.
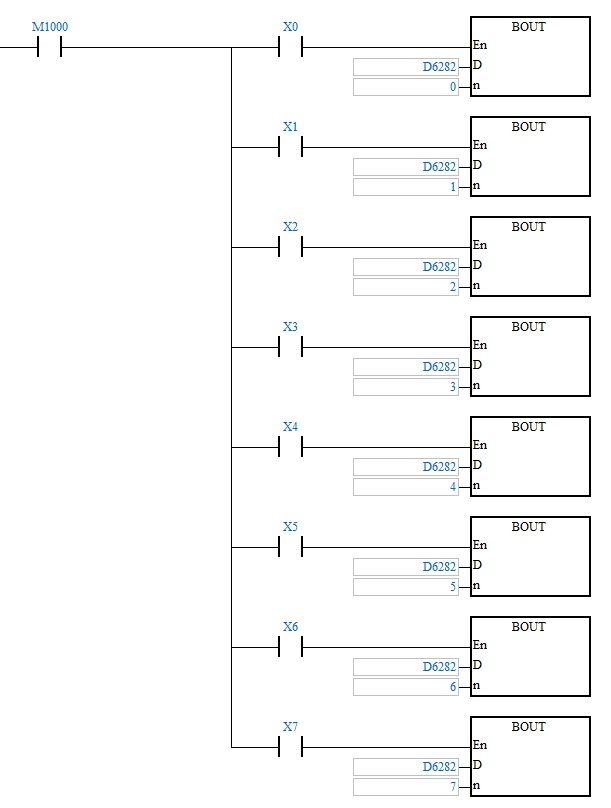
2. W celu wysłania danych do urządzenia MASTER przypisać dane do odpowiedniego rejestru (odczytanego w Output Table).
W przykładzie przypisano stan kolejnych wejść sterownika do kolejnych bitów rejestru D6282 za pomocą instrukcji BOUT (pozwala na wpisanie na dany bit w rejestrze 1 lub 0 zgodnie ze stanem wejścia En).

3. Wgrać program do urządzenia SLAVE.
4. Połączyć się ze sterownikiem MASTER. Uruchomić program ISPSoft i utworzyć nowy projekt zgodny z modelem sterownika. Utworzyć nowy program w projekcie.
5. W celu odbierania danych z urządzenia SLAVE przepisać dane z odpowiedniego rejestru (odczytanego w Input Table) do zadanego rejestru.
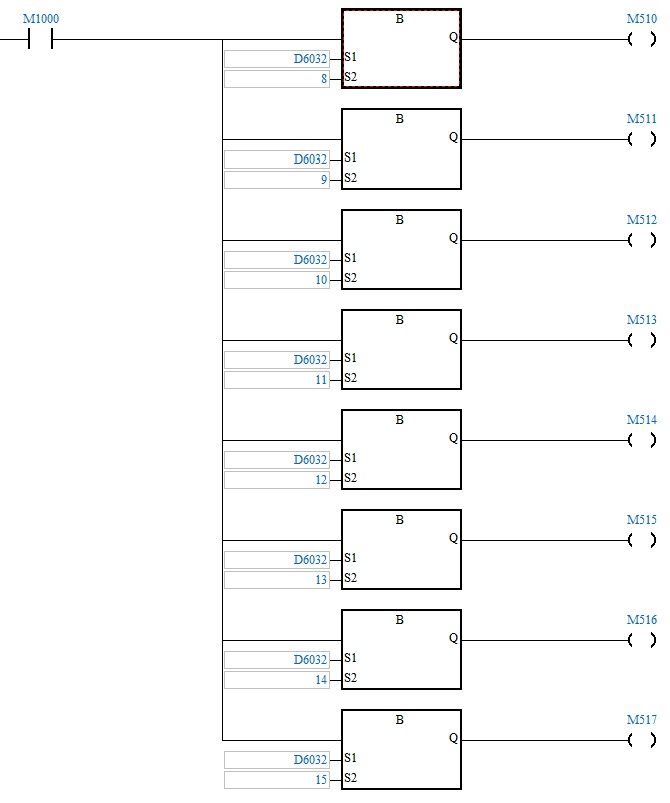
W przykładzie przepisano stan kolejnych bitów rejestru D6032 do flag M500-M507 oraz M510-M517 za pomocą instrukcji BLD (wystawia na wyjściu stan zgodny ze stanem wybranego bitu w rejestrze).

W powyższy sposób otrzymaliśmy wejścia sterownika SLAVE (X0-X7 oraz X10-X17) zmapowane na flagi w rejestrze sterownika MASTER (M500-M507 oraz M510-M517).