Sterownik ruchu DVP50MC11T
Sterownik ruchu DVP50MC11T to zaawansowany kontroler ruchu, wyposażony w kilka portów komunikacyjnych, w tym wysoce wydajny protokół przemysłowy – EtherCAT. Kontroler jest połączeniem tradycyjnego sterownika PLC ze sterownikiem ruchu o szybkiej transmisji danych i rozbudowanej bibliotece instrukcji sterowania ruchem. Zwiększenie możliwości oraz obszaru zastosowań kontrolera zapewnia kompatybilność z modułami rozszerzeń serii Slim.
Budowa kontrolera
- Zabudowane złącza I/O:
- 16 szybkich wejść cyfrowych;
- 8 szybkich wyjść cyfrowych.
- Wbudowane porty komunikacyjne:
- 2x CANopen (master/slave);
- 1x EtherCAT do sterowania ruchem;
- 1x Ethernet;
- 1x RS-232 / RS-485.
- 1x złącze enkodera absolutnego SSI.
- 1x złącze obsługujące dwa enkodery inkrementalne.
- 1x slot na kartę pamięci SD.
- Kompatybilność z modułami rozszerzeń serii Slim.

Cechy, funkcjonalności i zastosowania
- Pojemność programu 20MB.
- Obsługa do 32 osi (w tym 24 fizyczne).
- Możliwość implementacji osi wirtualnych.
- Instrukcje sterowania ruchem (łatwe w programowaniu).
- Instrukcje aplikacyjne dotyczące:
- krzywek;
- przekładni elektronicznej;
- funkcji noża obrotowego „rotary cut”.
- Obsługa G Code: interpolacja liniowa/kołowa/helikalna do 8 osi.
- Operacje zmiennoprzecinkowe wykonywane z częstotliwością 1GHz.
- Obliczenia o wysokiej precyzji (obsługa zmiennoprzecinkowego typu danych podwójnej precyzji LREAL).
- Czas synchronizacji: 4 osie w ciągu 2ms, 8 osi w ciągu 4ms.
- Możliwość zastosowania w zaawansowanych aplikacjach:

Przykładowa struktura układu

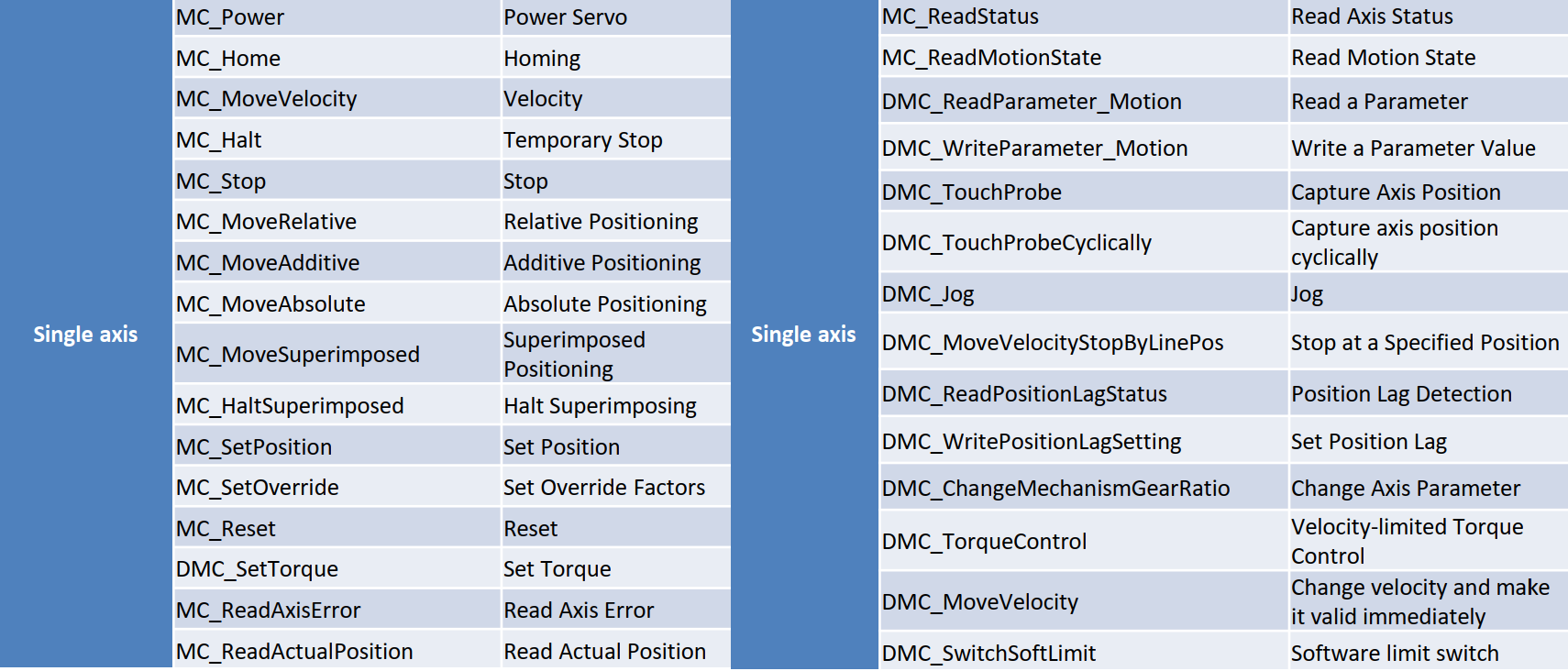
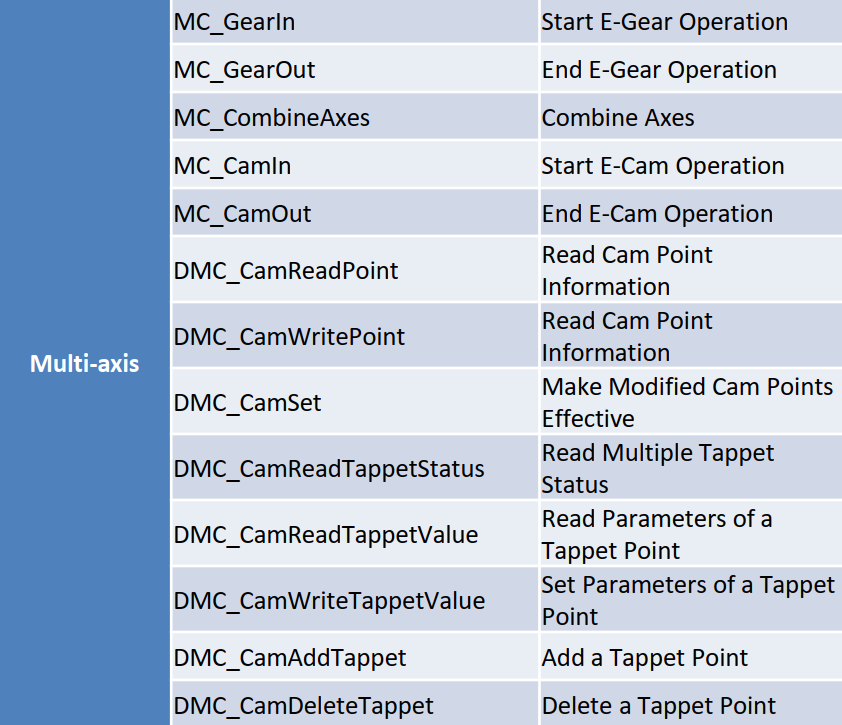
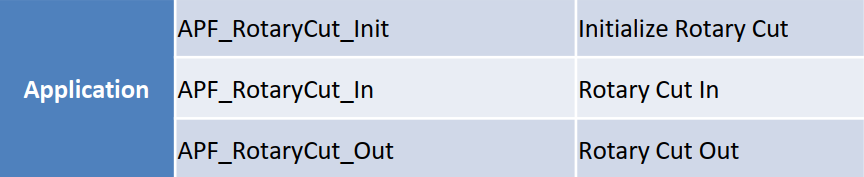
Najważniejsze instrukcje ruchu